-
-
Power off the printer.
-
Build the servo switching arm:
-
Arm
-
M3 Washer
-
Bearing
-
M3 x 8mm bolt
-
-
-
Make sure the power is off and the printer is disconnected from your computer before starting!
-
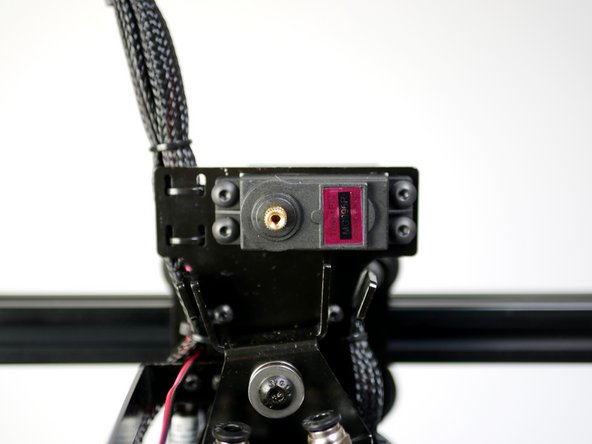
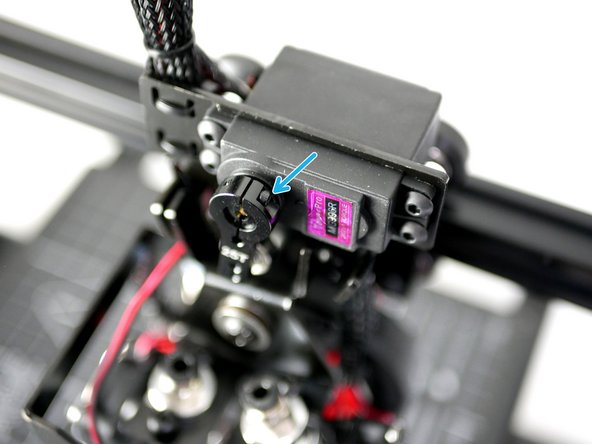
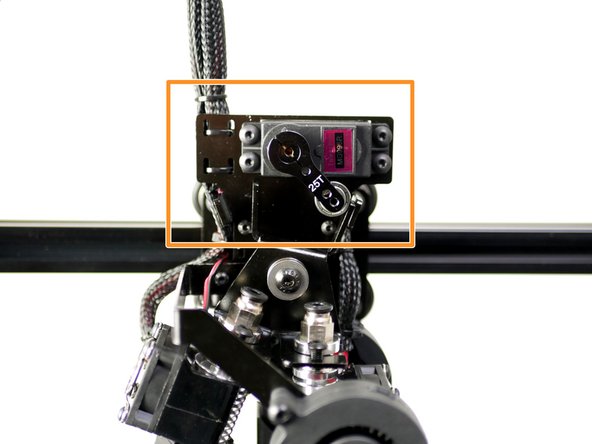
Using the servo arm rotate the servo gear clockwise as far as it will go.
-
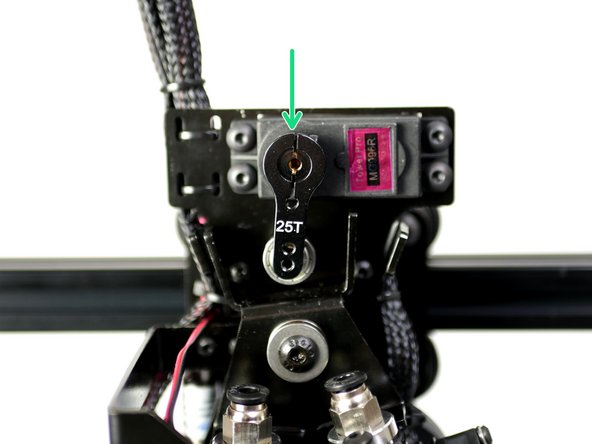
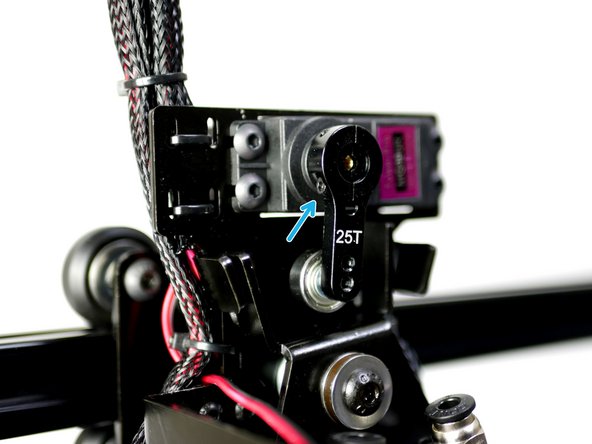
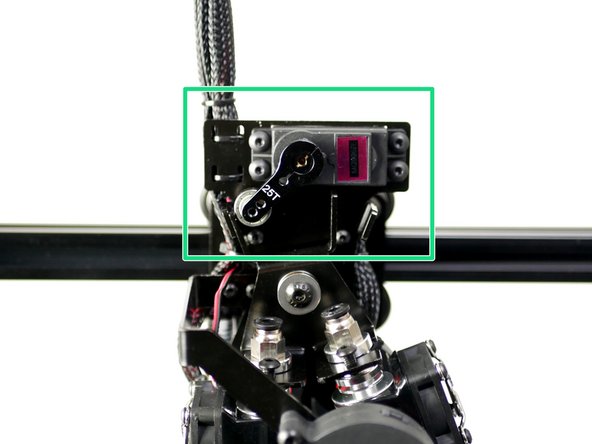
Next re-insert the arm as shown in the second photo and rotate the servo gear counter clockwise 120 degrees (third of a full turn) to get to the position shown in the third image.
-
Remove the arm when done.
-
-
-
Make sure the arm is not attached to the servo.
-
Power on the printer from the mains.
-
Power on/off a few times until the servo stops moving and to be sure it has settled to the 0 position.
-
-
-
Connect your printer to your computer's control software.
-
Send the command:
-
M280 P3 S45
-
Further reading on the M280 command here.
-
-
-
Install the Arm vertically onto the servo gear with the bearing facing down.
-
Install and tighten the two bolts to clamp the arm to the servo gear.
-
The bolts should be in the same bag as the arm.
-
-
-
In this order:
-
Send a T1 command to select Hotend #2
-
Send a T0 command to select Hotend #1
-
The servo will get warm, this is normal.
-
-
-
First power off the printer.
-
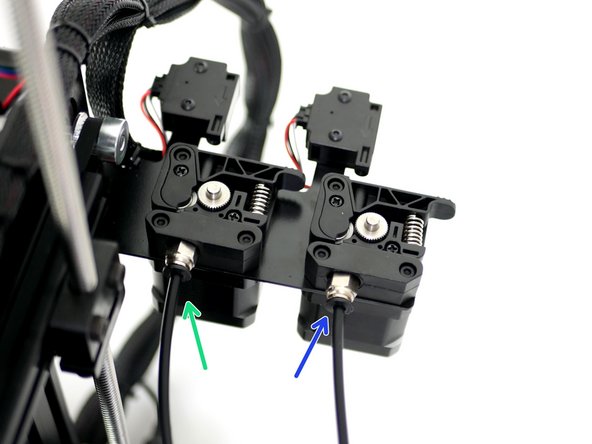
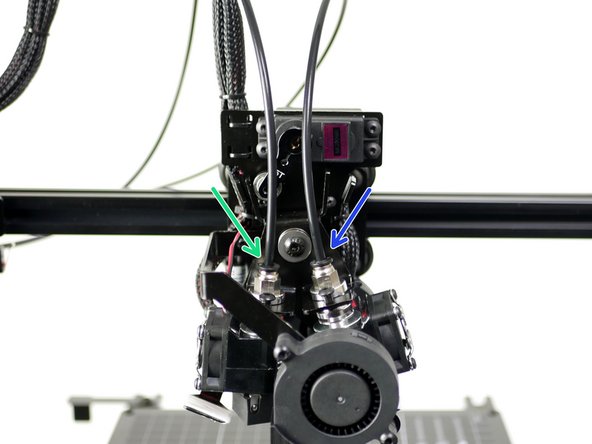
Install the PTFE tubes:
-
Hotend #1
-
Hotend #2
-
The PTFE tubes should go about 6CM into the Hotend from the top of the coupling. Not sliding a PTFE tubing in all of the way will clog and ruin the Hotend.
-
Power back on the printer
-
-
-
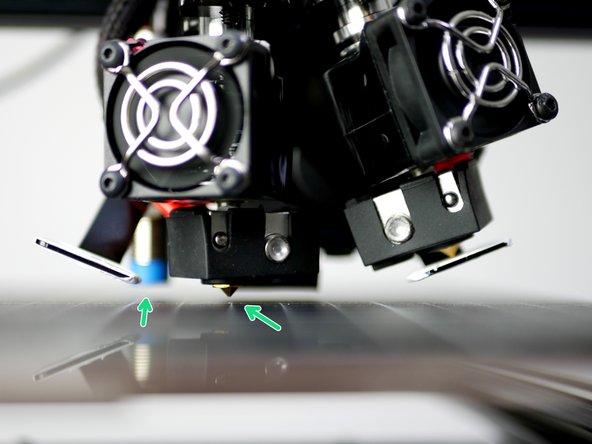
We've removed the second print fan to give a more clear view of the Hotends.
-
Home X
-
With X homed the nozzle should land above the right edge of the print surface.
-
-
-
Home Y
-
The nozzle on the Proforge 2S lands about 2cm from the top edge of the print surface, this is OK, as we've accounted for it in the firmware, line 895; 200 + 22 = 222.
-
-
-
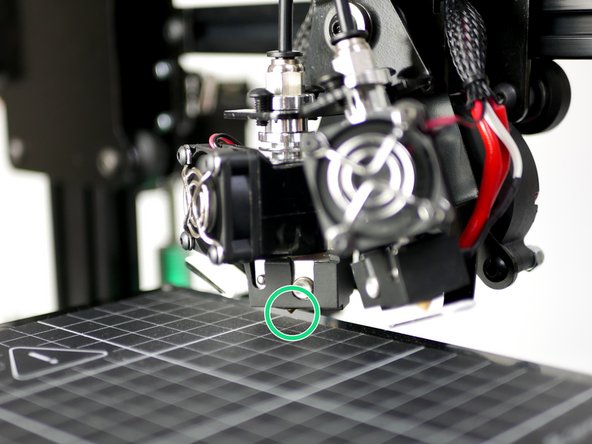
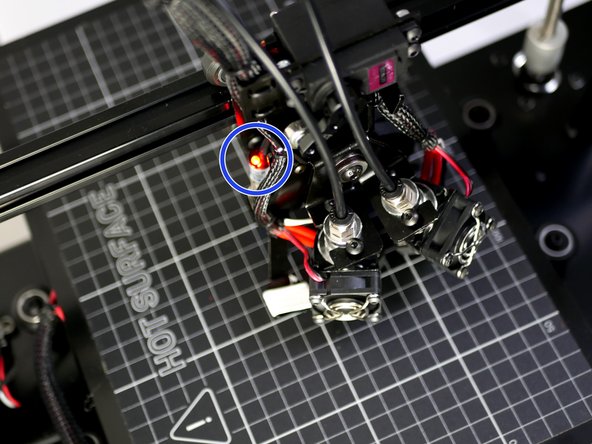
Make sure the print surface is metal in order for the probe to trigger. Make sure that any surface you plan to have installed when printing is on the platform.
-
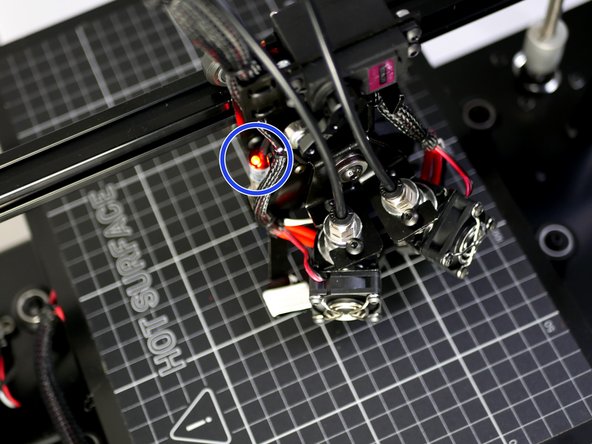
Lower the gantry by hand so that the nozzle comes close to the print surface. Once close enough the red light on the probe should come on.
-
The nozzle tip should always remain above the surface when the probe is triggered. The bottom of the probe should always remain above the tip of the nozzle.
-
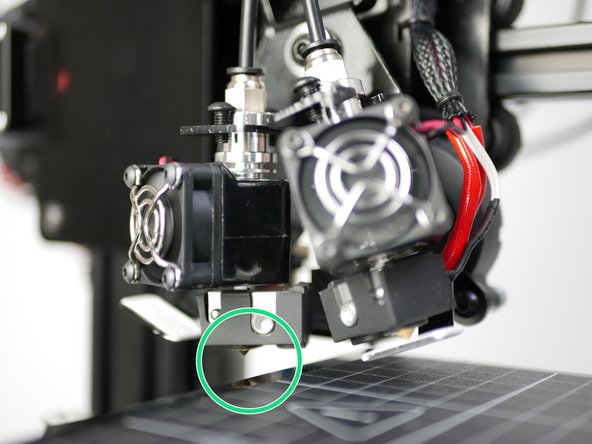
Nozzle too close or hits the print surface before the red light on the probe comes on:
-
Lower the probes position on the mount and check again.
-
Red light on probe but nozzle tip is too far away (more than 3mm) from the print surface or the probe is coming in contact with the surface before the nozzle:
-
Raise the probes position on the mount and check again.
-
-
-
If your platform has springs, adjust them now so that the print surface is parallel to the nozzle of Hotend #1.
-
-
-
To check that the probe and bed is set up correctly we are going to Home all of the axes together.
-
Use your controller to home all of the axes.
-
X & Y will automatically home first. Then the probe should move to the centre of the platform and slowly lower until it's triggered.
-
The gantry will go up at first and then begin lowering - this is normal.
-
Have your finger ready on the power switch to power off in the event of a crash. If you do crash the hotend into the platform re-check your probe postioning - it's likely too far above the nozzle and needs lowering.
-
-
-
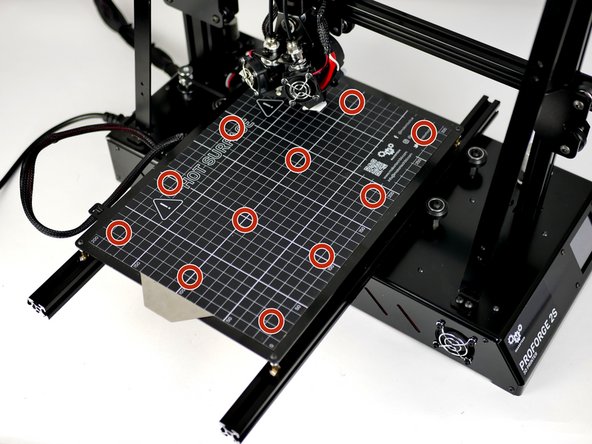
With a successful Z Home send a command (G29) to start the auto-levelling procedure.
-
The axes will home again and the sensor will now go around probing the platform.
-
Again, have your finger ready on the power switch to power off in the event of a crash.
-
Once the Auto-levelling has been completed, re-home all of the axes to return the nozzle to the centre of the platform.
-
-
-
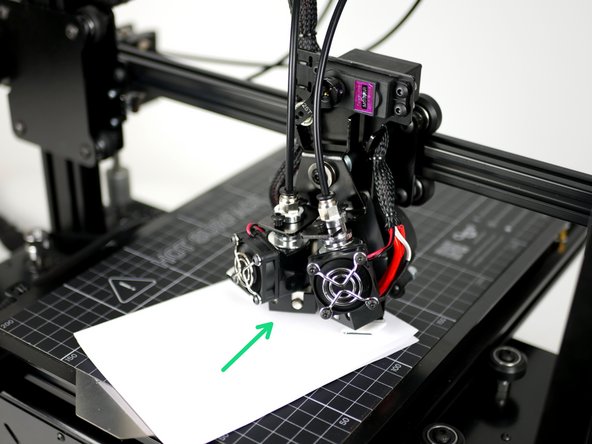
Take the folded piece of paper and place it between the surface and the nozzle of Hotend #1.
-
On your controller lower the nozzle (z-axis) in 0.1mm increments until it begins to grip the paper.
-
Make a note of the Z height when the paper begins to be gripped. (This value will be 3.00mm to begin with, this is normal.)
-
In our case on the Proforge 2S it ended up being 1.90mm when the paper began to be gripped, but this value will be different for everyone.
-