
-
-
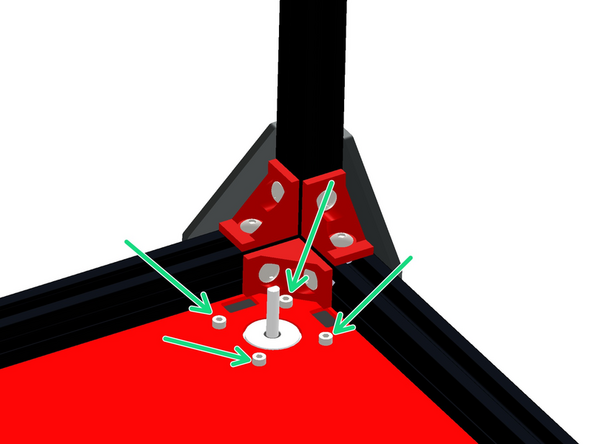
Prepare the base as shown:
-
M5 x 8mm Button
-
M5 T-nut
-
As before, do not tighten these nuts, they just need to be placed on by a few turns - they will be tightened down in the next step against the extrusions.
-
-
-
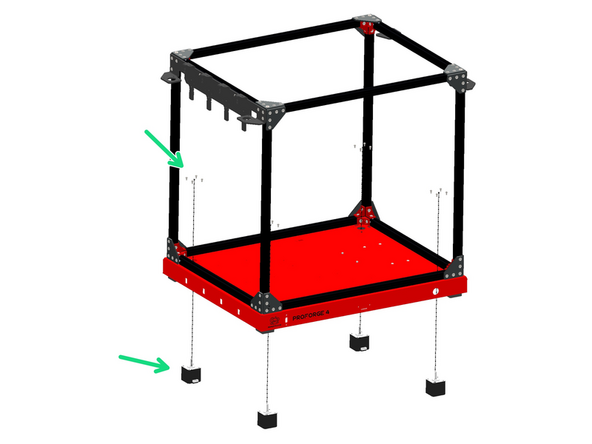
Secure the base to the bottom of the frame, orientating it as shown. Tighten the bolts from the previous step against the extrusions on the bottom of the frame.
-
Also add to each corner a rubber foot.
-
M6 x 75mm Bolt
-
Align the foot so that it slots in place into the cutouts on the base.
-
-
-
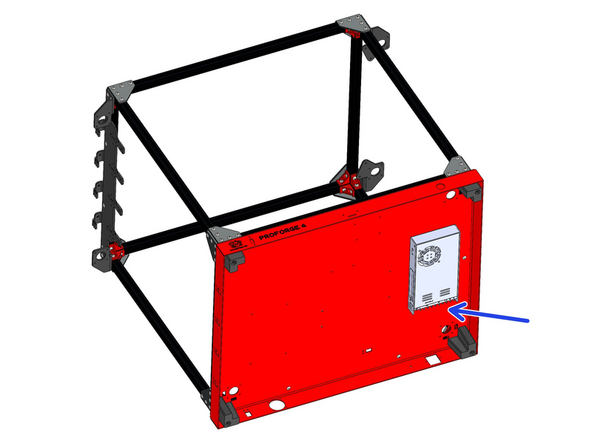
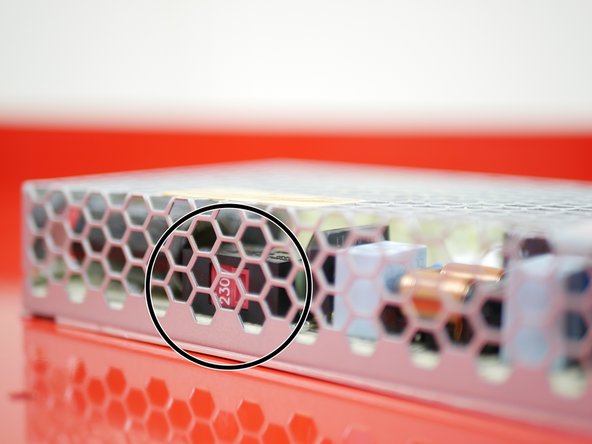
Before mounting the PSU, check that its voltage input is adjusted correctly. The switch on the side of the unit should be set to your mains voltage. For example, in Europe this would be 230v, and in North America it would be 110v.
-
-
-
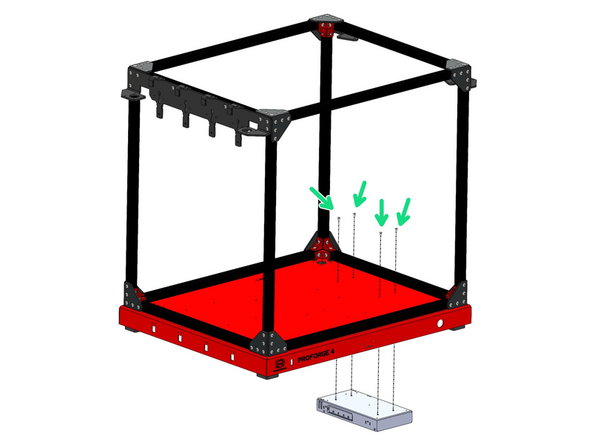
Mount the 24V PSU to the base.
-
M4 x 6mm Button Head Bolts
-
Ensure it's mounted with the terminals pointing to the rear of the machine.
-
-
-
Before mounting the PSU, check that its voltage input is adjusted correctly. The switch on the side of the unit should be set to your mains voltage. For example, in Europe this would likely be 230v, and in North America it would be 110v.
-
-
-
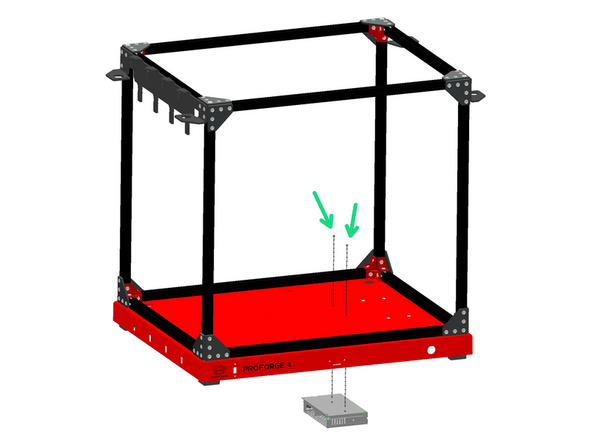
Mount the 48V PSU to the base.
-
M3 x6mm Cap Head Bolt
-
Again - ensure it's mounted with the terminals pointing to the rear of the machine.
-
-
-
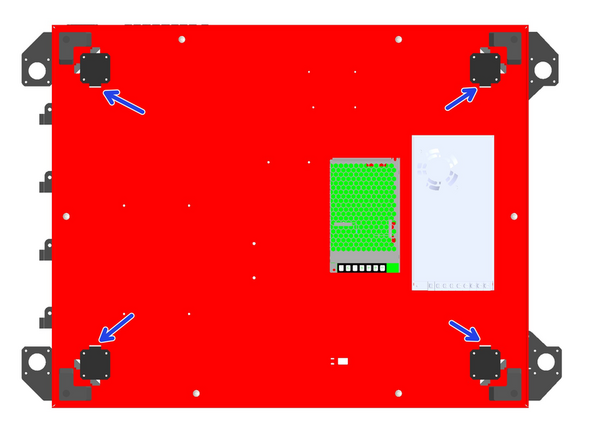
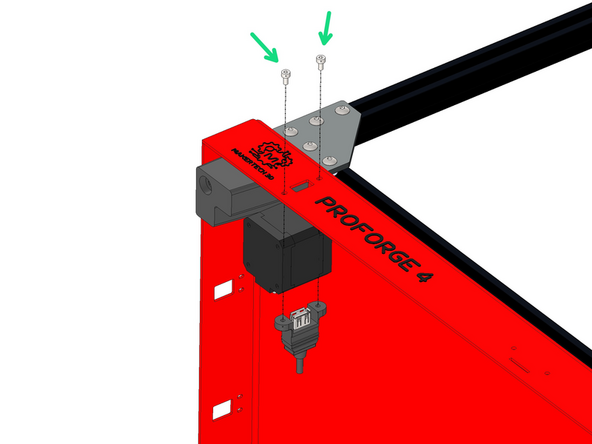
Mount the four NEMA-17 Motors to the base with M3 x 6mm cap head bolts.
-
These are the smaller BIQU marked motors.
-
Ensure that the cable connectors on the motors are all facing inwards under the base as shown.
-
-
-
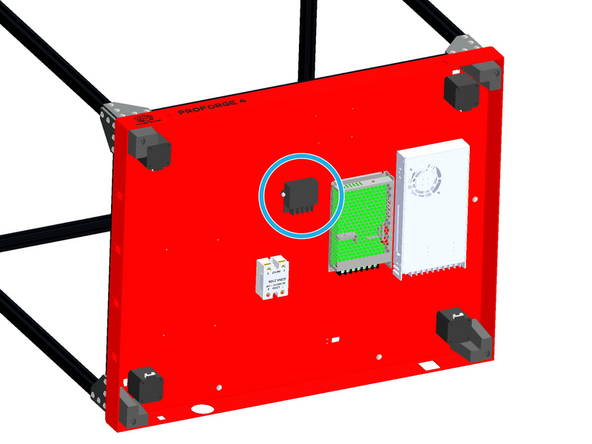
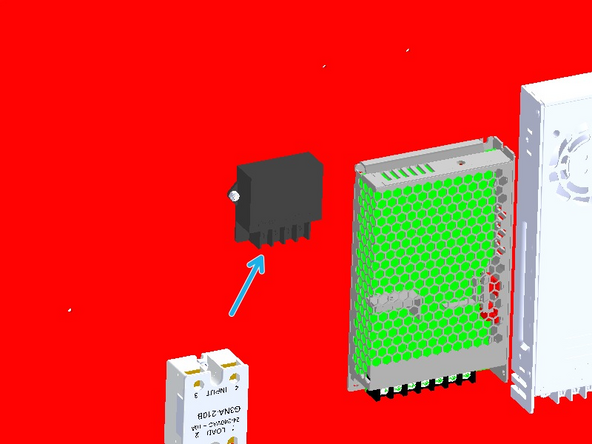
Mount the SSR Relay to the base.
-
M4 x 12mm Button
-
M4 Nyloc
-
Mount the SSR with the load side terminals facing the rear of the base.
-
Bolt orientation is purely aesthetic, feel free to install the other way round (easier), with the nut on the top side of the base.
-
-
-
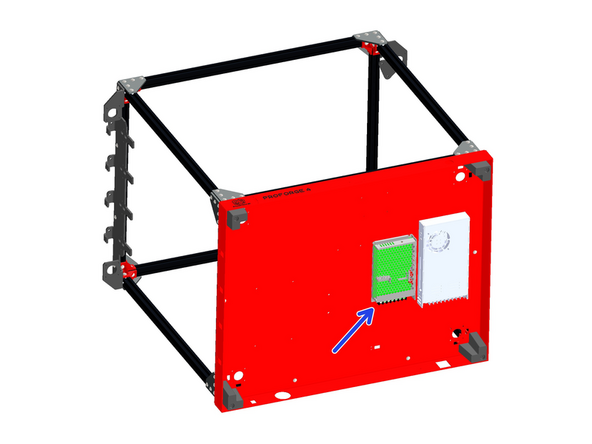
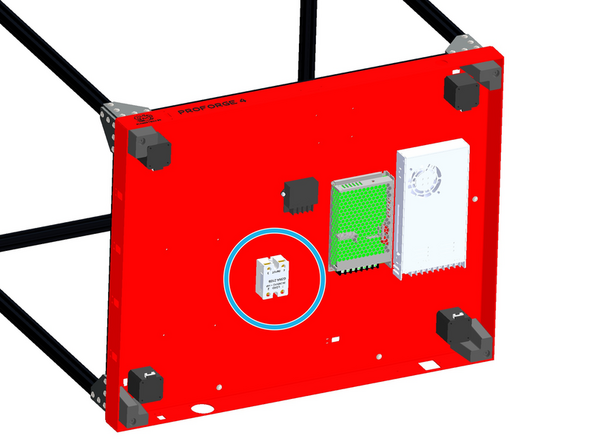
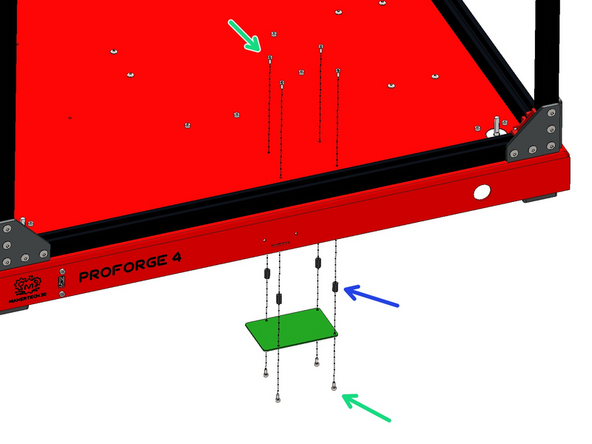
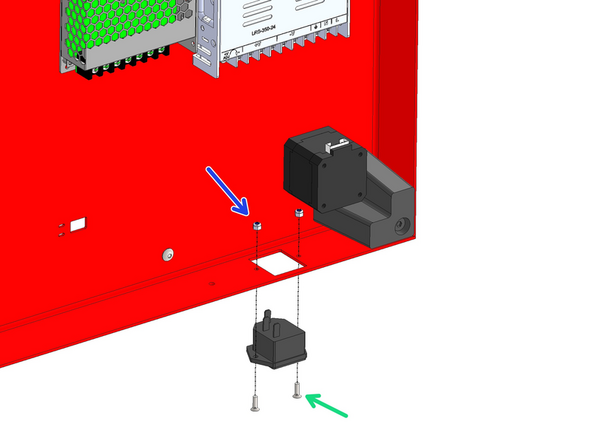
Mount the 5V Power Convertor to the base.
-
M3 x 8mm Bolt
-
M3 Nyloc Nut
-
Orientate the power convertor so that its terminals are facing the rear of the base as shown.
-
-
-
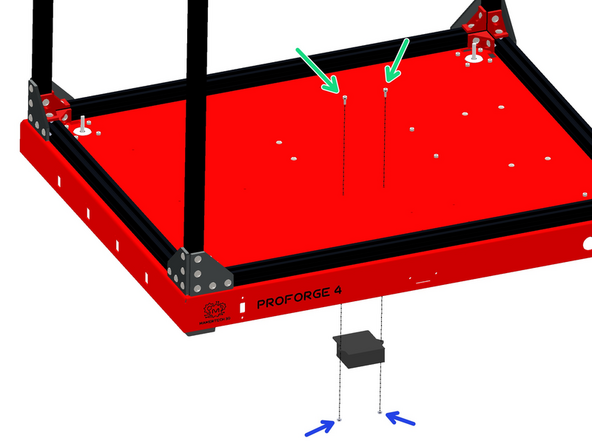
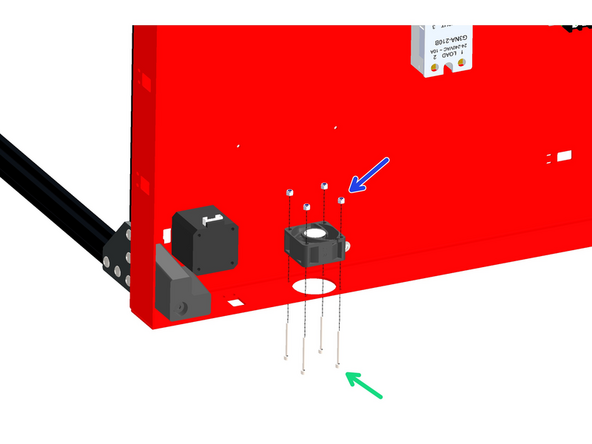
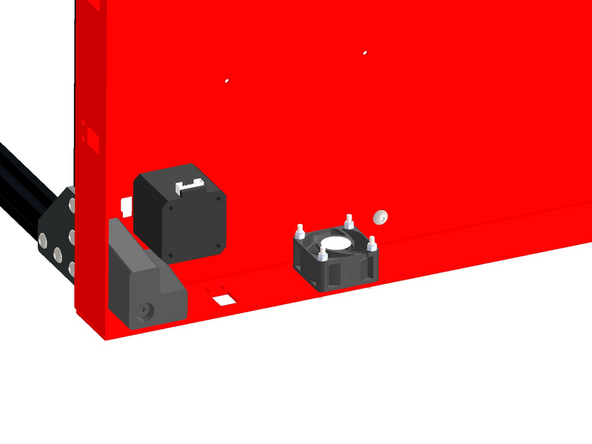
Mount the 40mm fan as shown - orientate the cable so it points to the top of the base.
-
Select the fan with the shorter (approx 20cm) cable.
-
Install the fan with the sticker side facing into the base.
-
M3 x 28mm Bolt
-
M3 Nyloc Nut
-
-
-
Before unpacking the Pi control board make sure that you have grounded yourself. You can do this by touching a large metal object. This is to prevent any static from damaging the control board when handling it.
-
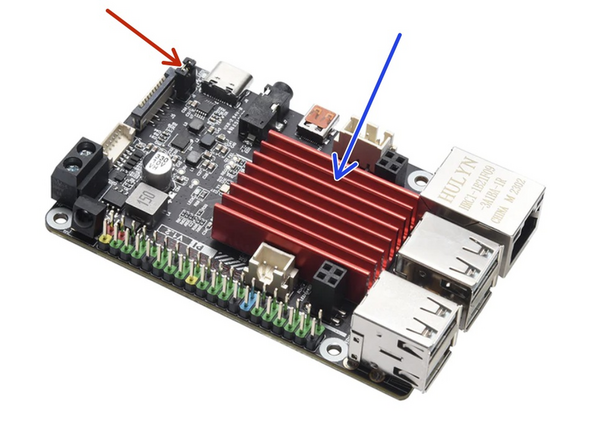
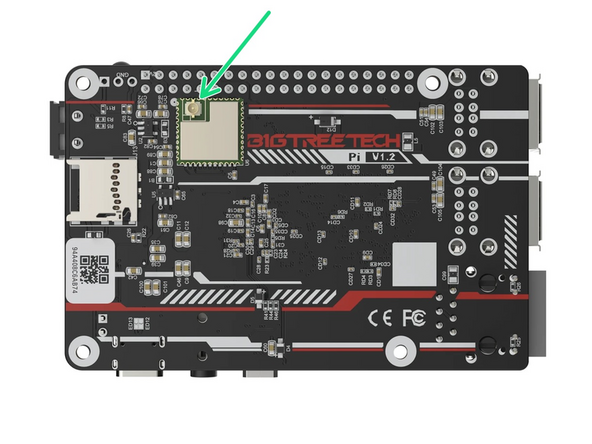
Stick the heatsink on to the Pi board.
-
Ensure that there is no jumper placed here - you may need to remove it.
-
Connect the WiFi antenna to the back of the board.
-
-
-
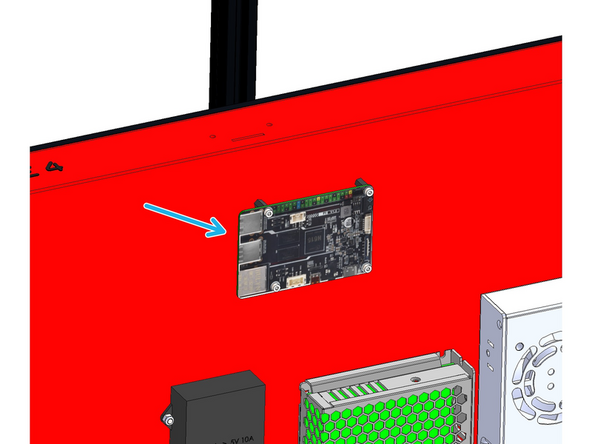
Mount the board to the base:
-
M2.5 x 6mm bolt
-
M2.5 x 10mm standoff
-
Mount the board with the USB ports pointing to the left as shown.
-
Do not stick the antenna to the base as this may cause signal issues if it is stuck onto metal. Instead leave it hanging.
-
-
-
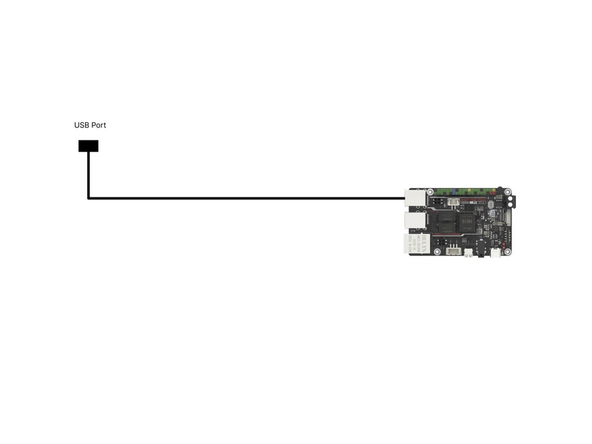
Connect the other end of the front USB port cable to a USB port on the Pi board.
-
-
-
Before unpacking the control board make sure that you have grounded yourself. You can do this by touching a large metal object. This is to prevent any static from damaging the control board when handling it.
-
After unpacking the control board you should find a bag of jumpers.
-
Use these jumpers to close connections between pins as shown on the diagram.
-
Set fan voltages to board voltage (24v)
-
Set thermistors to PT1000 (small jumpers)
-
Set gantry motors to 48V
-
Set all other motors to board voltage (24v) Installing these in the wrong position will cause damage to the drivers!
-
Make sure there is NO jumper placed on theUSB power pins.
-
-
-
Before unpacking the stepper driver boards make sure that you have grounded yourself. You can do this by touching a large metal object. This is to prevent any static from damaging the drivers when handling them.
-
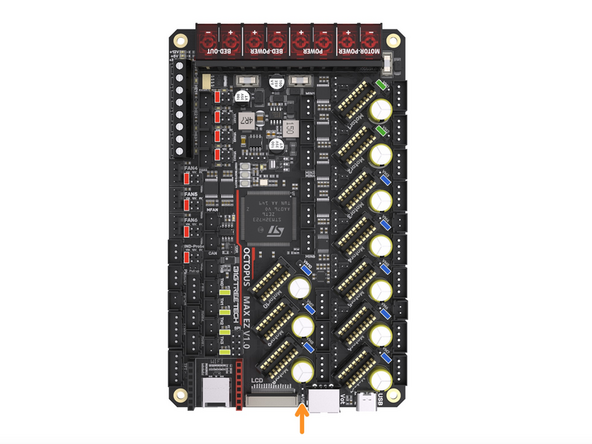
These drivers can only be plugged in one way. The fin side of the heatsink points towards the USB C port on the board.
-
With the board placed on a flat/hard surface, like a table, carefully push the motor drivers into their slots.
-
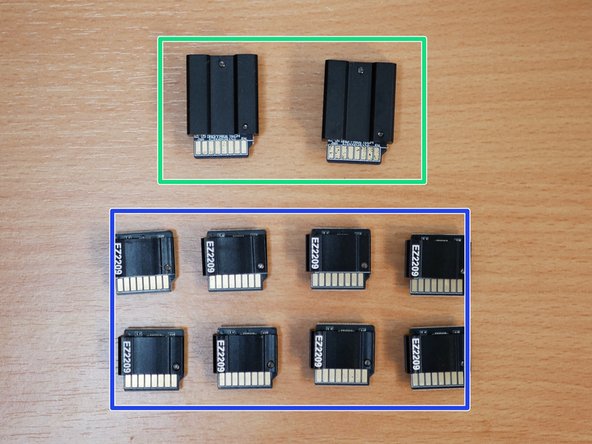
Plug the TMC5160 RGB EZ Drivers into the board as shown. They will drive the gantry motors.
-
Plug the TMC2209 EZ Drivers into the board as shown. They will drive the Z motors and extruders.
-
The extruder drivers are packed in with the print head bags.
-
You will have 4 for the z-motors by default and then one for each print head.
-
V4.2 does not require the E (extruder) stepper drivers - these are already installed on the print head tool board.
-
-
-
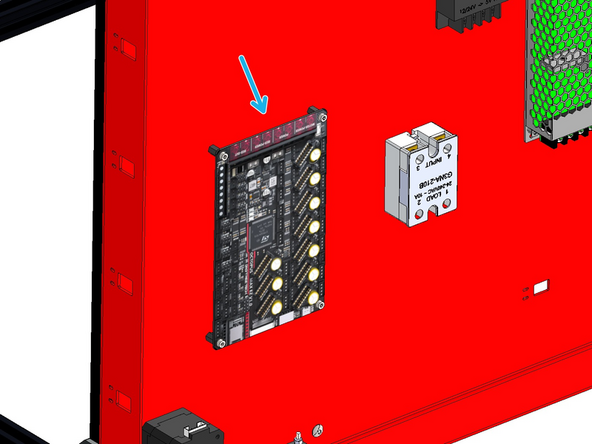
Mount the Octopus Control Board as shown:
-
M3 x 6mm Cap Bolt
-
M3 x 10mm Standoff
-
Orientate the board with the power terminals pointing to the front of the base.
-
-
-
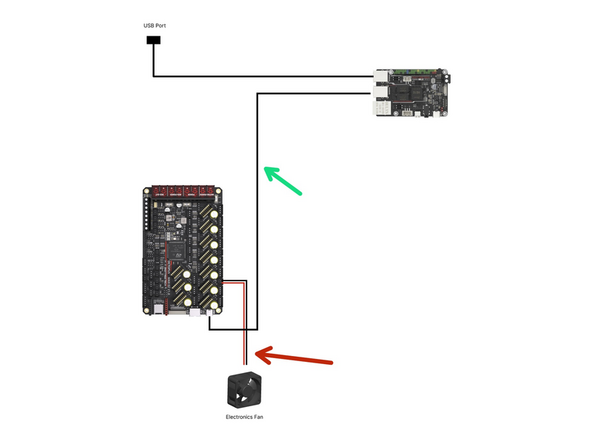
Connect the fan to the Octopus Max control board as shown.
-
Take the USB cable from the Octopus Max control boards box and connect one side to the USB C port on the control board and the other to a USB port on the BTT Pi.
-
-
-
Push all of the cables attached to the power port into the base.
-
Fix the power port to the rear of the base.
-
M3 x 10mm Counter Sunk Bolt
-
M3 Nyloc Nut
-
-
-
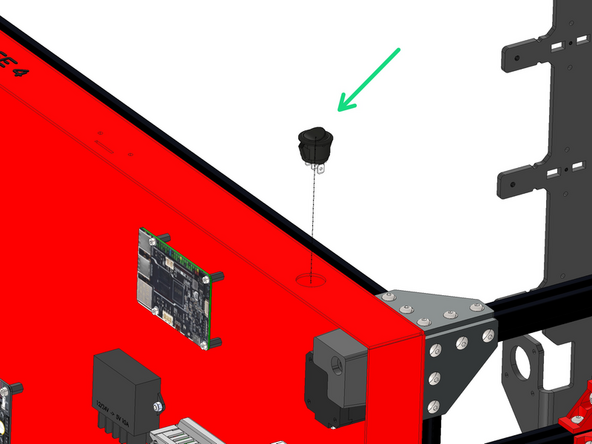
Disconnect the power switch from the mains power cable assembly. Push the power switch into the front of the base.
-
Connect the switch to the connector from the Power Port in the previous step.
-
-
-
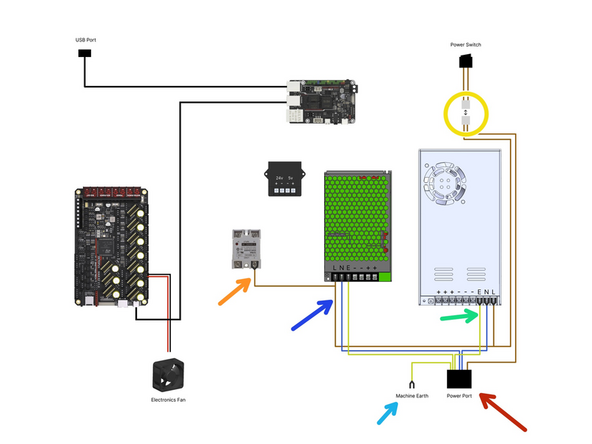
Connect the switch to the mains power port.
-
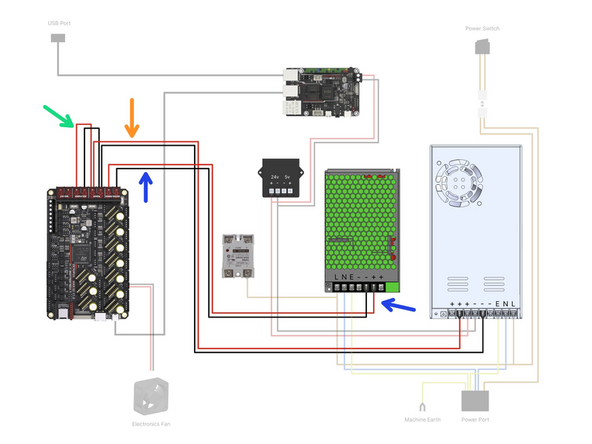
As shown in the diagram connect the cables from the mains power port to the:
-
24V Power Supply
-
48V Power Supply
-
SSR Relay
-
Fix the shortest earth cable to the base. Scuff the paint a little so that it is able to make contact with the metal.
-
M4 x 12mm button bolt and M4 Nyloc Nut
-
-
-
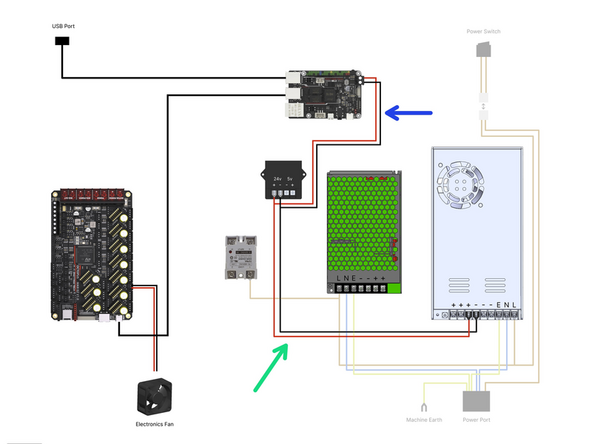
Wire the power converter and BTT Pi as shown.
-
Power Convertor cables - 50cm
-
Connect from 24V PSU to 24V terminals on converter.
-
Pi power cables - 30cm
-
Connect from 24v terminals on the convertor to the BTT Pi.
-
If you are building v4.2 and using the Pi 2 board then polarity is reversed, check under the board to confirm that red is going to positive and black to negative.
-
-
-
Fix the following power cables to the control board as shown.
-
24v Power Cables - 80cm
-
48v Power Cables - 70cm
-
Bed Power - 10cm
-














Cancel: I did not complete this guide.
20 other people completed this guide.

3 Comments
It might take only 45min-1hr for someone who is very familiar with this process. I'm guessing I spent 4 hours or so on this step. Of course, I read everything and double/triple checked everything.
Brian Mettlen - Resolved on Release Reply